
研究动态
智能机器人在制造领域的理论、算法和应用,包括机器人运动学/动力学,机器人-机器人/人协作及多模态感知等,寻找先进算法与最终质量之间的内在联系,使机器人系统得到高效、精确控制,并实现机器人高灵活性。
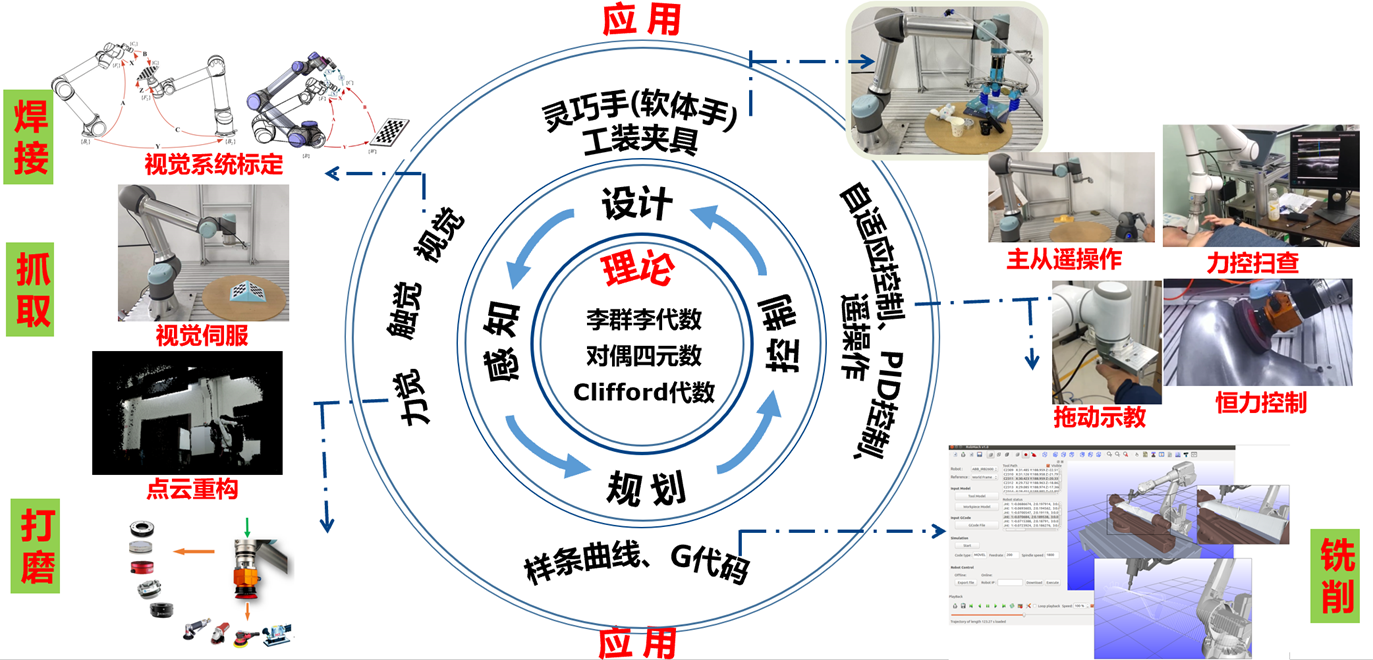
主要研究进展如下:
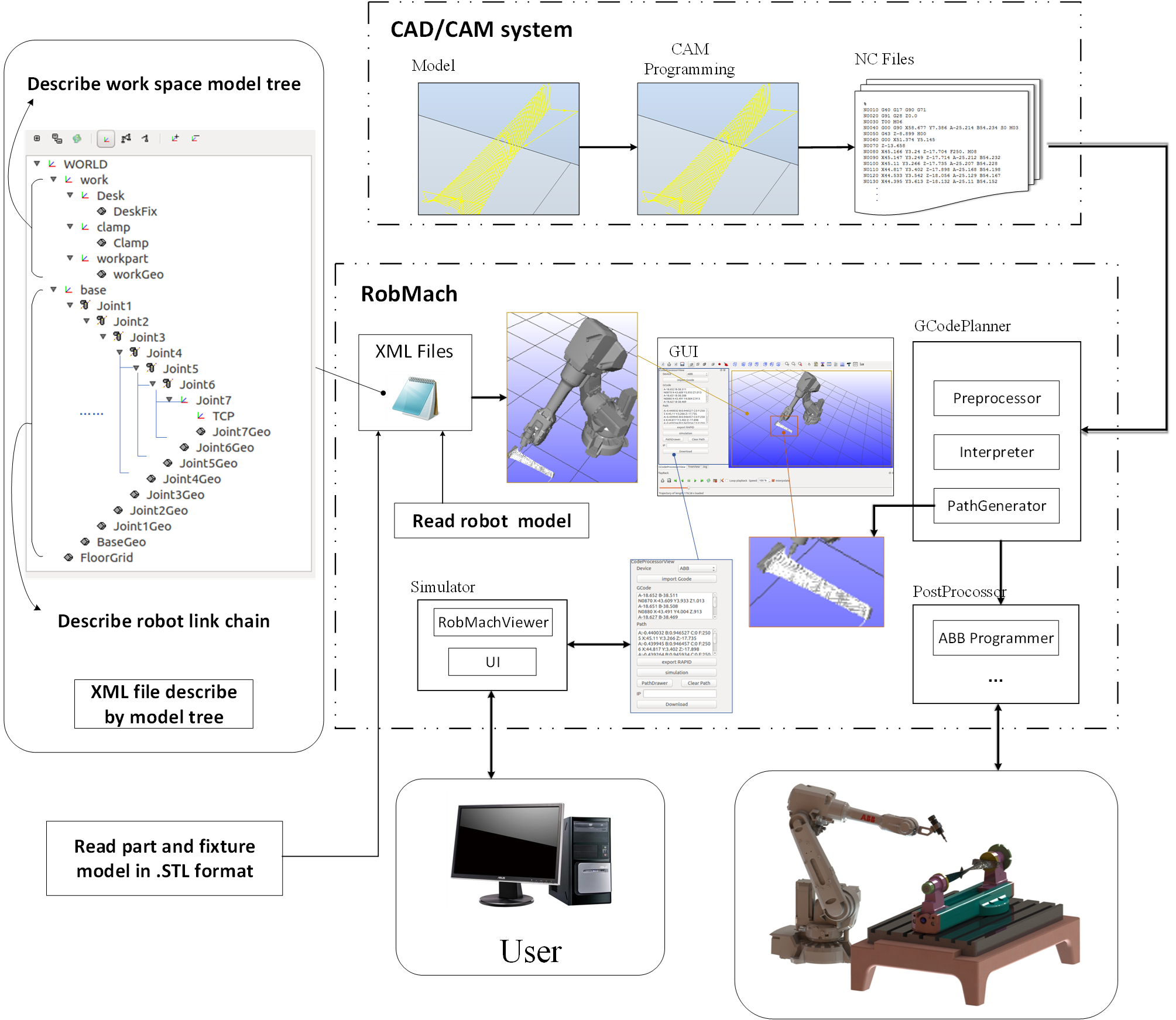
(1)机器人加工轨迹生成
提出了基于NC代码的机器人铣削控制指令的转换方法,并开发了机器人铣削加工仿真软件RobMach。该方法包括NC代码中数据的分析与提取,刀位点到机器人基坐标系的位姿转换和铣刀位姿的转换的三个过程。在此基础上,通过解析G-Code和机器人控制命令及其转换机制,开发了机器人铣削加工软件RobMach,首先需要将加工零件导入UG,利用UG的CAM模块得到刀位文件(G代码)。RobMach则将刀位文件转换成RAPID指令文件(.mod文件),软件可以根据转换的指令仿真出机器人的完整动作,并将指令直接传输给机器人,实现机器人的离线编程功能。本软件主要由输入输出区、代码转换可视区、仿真运动可视区、铣削轨迹生成区、仿真执行控制区构成。其功能主要是将导入的G Code转换为机器人的RAPID指令(.mod文件),并进行仿真验证。
 |
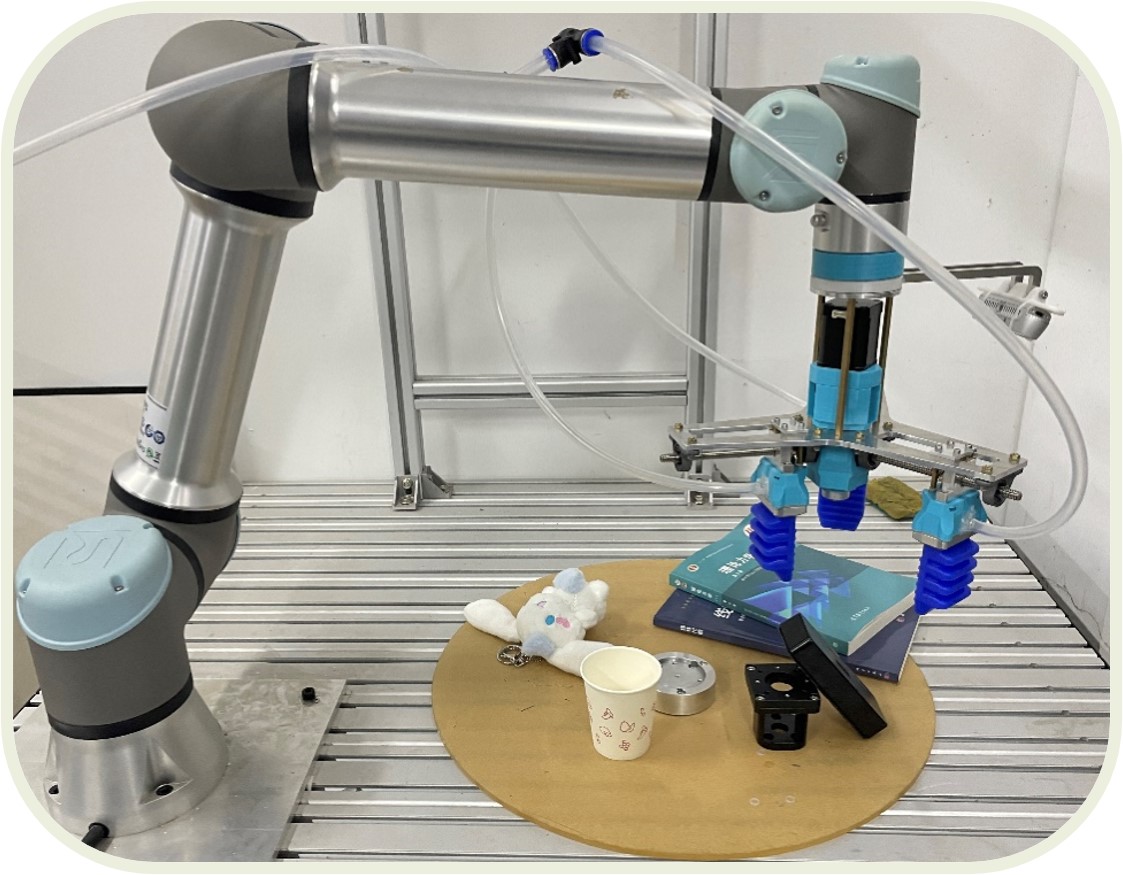
(2)软体手设计
设计的智能多指软体手IntMSHand,配备了多指手(手)、视-触觉系统(眼、触)等,实现“手眼触”一体化的智能软体手抓取操作。核心技术:1)多个软体手指与反馈调节装置,实现各种不同尺寸与外形物体的自适应抓取;2)3D视觉结合机器学习,实现待抓取物体的识别与位姿估计、以及抓取任务规划;3)基于视-触觉传感器的被抓取物体的力位精准控制。技术优势:对被抓取物体的适用性强,特别针对精密零部件,能够保证抓取的准确性与鲁棒性,可应用到智能制造,食品业、3C行业等领域。
 |
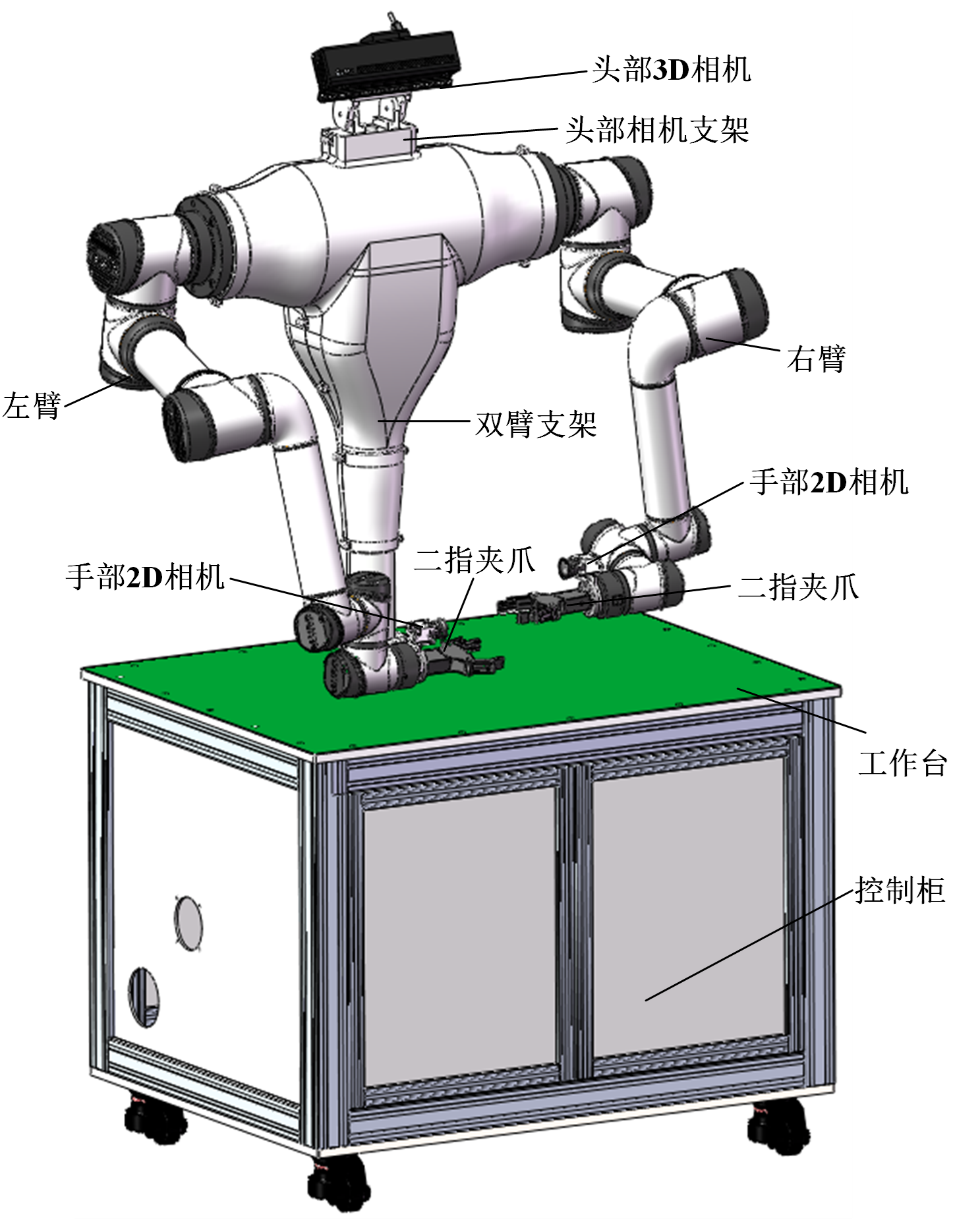
(3)双臂与遥操作机器人
双臂协作机器人主要包括工作台、控制柜、两台六自由度机械臂、双臂支架、两个二指夹爪、头部3D相机、两个手部2D相机、工控机及ROS机器人操作系统等,可以实现抓取、装配等任务。
 |
(4)移动检测机器人
由MK ROBOT-01室外智能移动平台、AUBO I7协作机械臂、机械臂升降装置、热成像光双谱云台、高性能工作站、ROS操控软件等组成,智能移动复合机器人搭载有ROS操控软件的高性能移动工作站,通过激光雷达、IMU、RTK等传感器实现机器人的定位导航、自主避障、自主路径规划、远程控制以及不同高度范围内的检测等功能。
 |
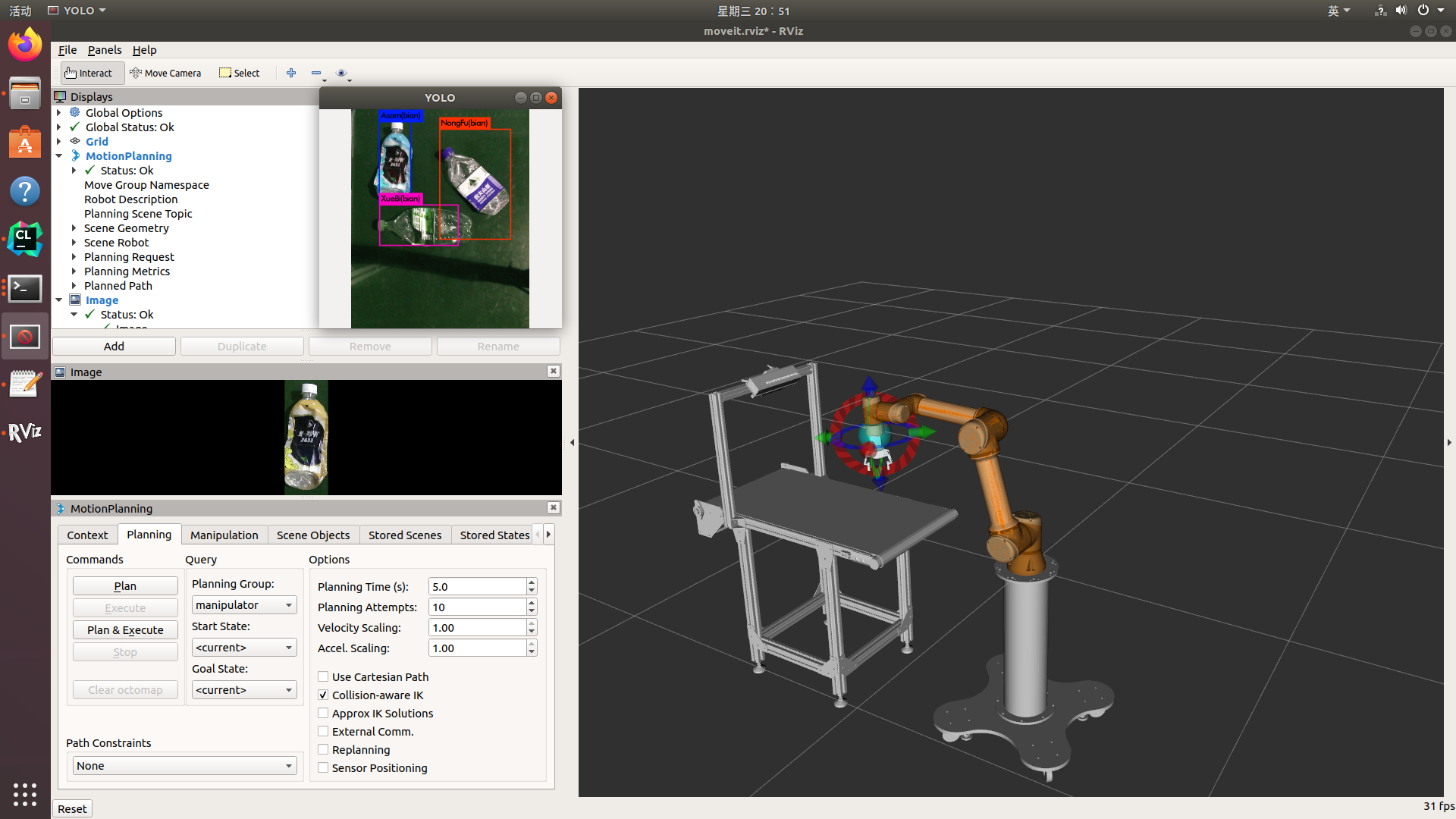
(5)智能垃圾分拣机器人
智能垃圾分拣机器人系统是一种用于垃圾分拣的新型机器人,搭载有ROS操控系统(脑)的高性能智能工作站,可根据用户需求配置深度相机(眼);拥有多自由度的机械臂,机械臂末端可以集成各种末端执行器(手),这样就形成“手眼脑”一体化智能分拣机器人系统,通过YOLO V3网络对可回收垃圾、有害垃圾、特色厨余垃圾以及其他垃圾进行识别,然后机器人实现垃圾的分类工作。
 |